
fig.1 2次 IIR LPF ダイアグラム (状態変数型)
Listing.1 Cプログラム例 (状態変数型)
float
iirlpf(in, reset)
float in;
int reset;
{
float t;
static float d1, d2;
static float k = 0.125; /* 0 < k < 1 */
if (!reset) {
t = d1;
d1 += (d2 - in) * k;
d2 -= (t + d2 * 2.0) * k; /* Q = 0.5 */
return d2;
}else{
d1 = -2.0 * in;
d2 = in;
return d2;
}
}
|
この例では浮動小数点演算を行っているが、プログラム中の乗算箇所は時定数 k を
2の倍数、例えば 1/8 に選ぶことにより整数演算版にも簡単に修正できるはずである。
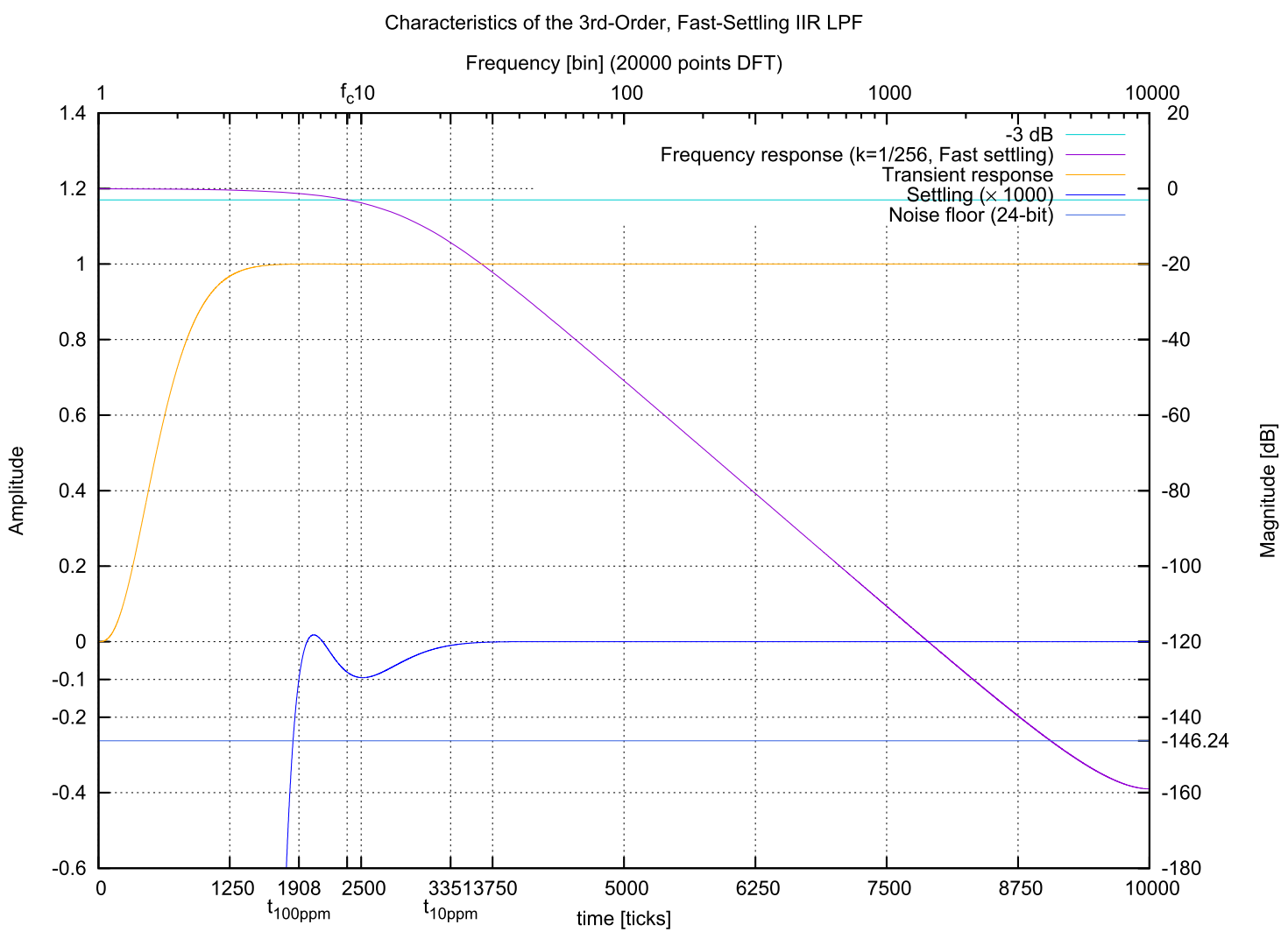
fig.2 は上述のデジタルフィルタの過渡応答の例である。
オーバーシュートが発生していないのが見てとれる。また、fig.3 のアナログ
フィルタの過渡応答とほぼ同等な過渡応答になっていることも分かる。
fig.2 2次 IIR LPF のステップレスポンス
fig.3 は、変換元のアナログフィルタ(fig.4) の過渡応答特性の SPICE シミュレーション例である。 Q = 0.5, 自然周波数 ωn = 2/3 に選んである。
fig.3 2次 状態変数型 LPF のステップレスポンス

![[Mail]](/~lyuka/images/mail.gif) © 2000 Takayuki HOSODA.
© 2000 Takayuki HOSODA.